
Vorbereitung
 Click to enlarge
Click to enlargeStep 1.1
P & I Verstärkung - Betaflight Vorbereitung
 Click to enlarge
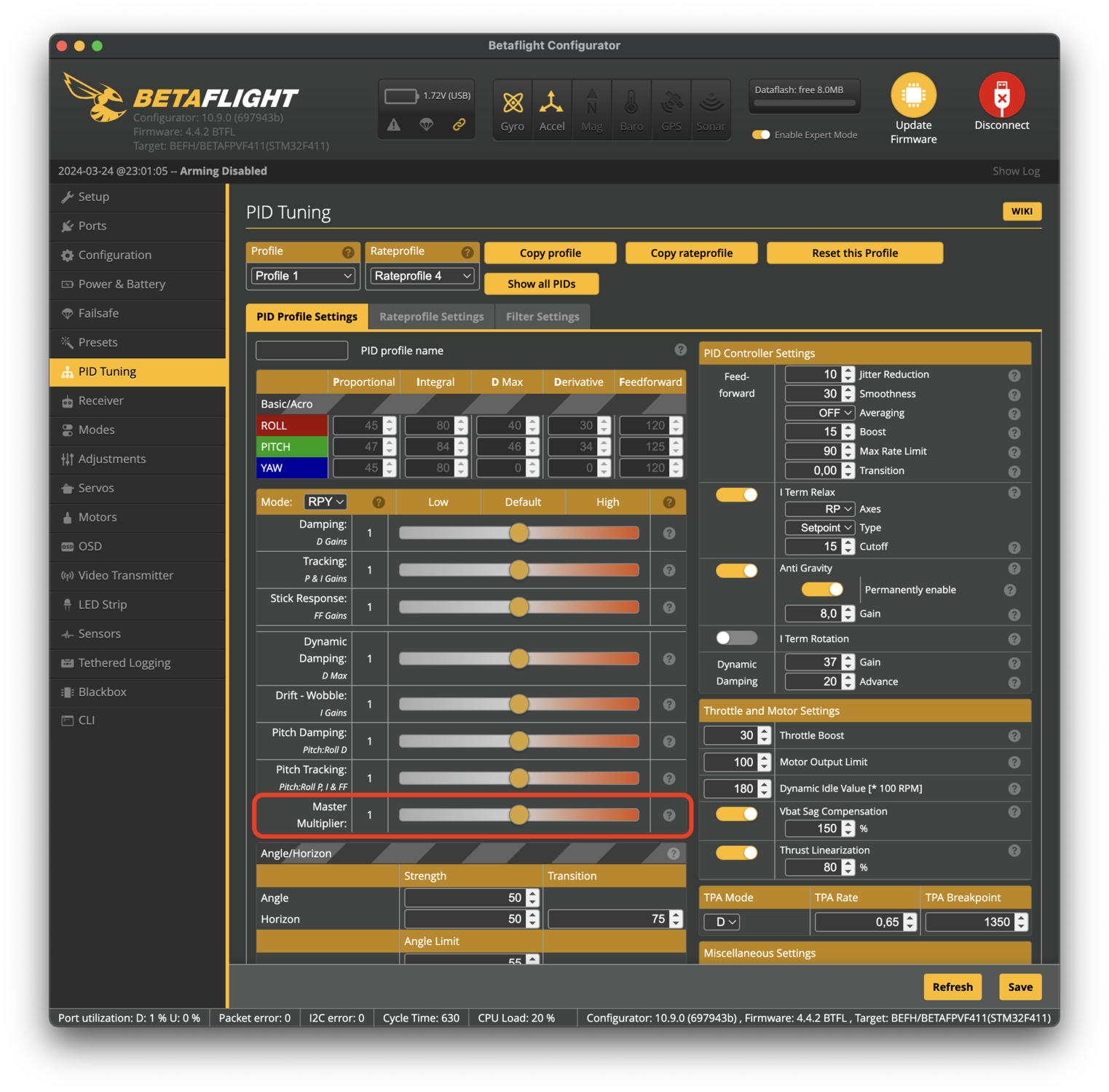
Click to enlargeVerbinde deine Drohne mit Betaflight und gehe auf den Reiter PID-Einstellungen (#1).
Aktiviere den Expertenmodus oben rechts im Konfigurator (#2)
Bewege den Schieberegler „Drift - Wobble“ (I Verstärkung) nach unten auf 0 (#3)
Schiebe den „Stick Empfindlichkeit - FF (Feedforward) Verstärkung“ Schieberegler (#4) auf 0
Klicke auf „Speichern“.
Step 1.2
P & I Verstärkung - Flüge
 Click to enlarge
Click to enlargeJetzt ist es an der Zeit, einige Flüge zu machen.
Es spielt keine Rolle, ob du im ANGLE- oder ACRO-Modus fliegst.
Die Idee ist, einen Flug zu machen, dann den "P & I Verstärkung" Slider („Nachverfolgung“) einen Schritt weiter nach rechts zu bewegen und das zu wiederholen, bis du die maximale Sliderposition erreicht hast.
Wir empfehlen, den Regler um 0,2 zu bewegen.
Fliege jedes Mal etwa 20 Sekunden lang.
Führe schnelle Roll- und Nickbewegungen aus (links, rechts, vorwärts, rückwärts).
Es ist viel einfacher, den Schiebereglerwert direkt im Betaflight OSD deiner FPV-Brille zu ändern, als die Drohne nach jedem Flug mit dem Computer zu verbinden.
Öffne einfach das OSD-Knüppelmenü und navigiere zu Profil > Vereinfachtes Tuning > PI Verstärkung (dies ist dasselbe wie der „Nachverfolgung Slider“ im Konfigurator)
Step 1.3
Logdatei extrahieren
 Click to enlarge
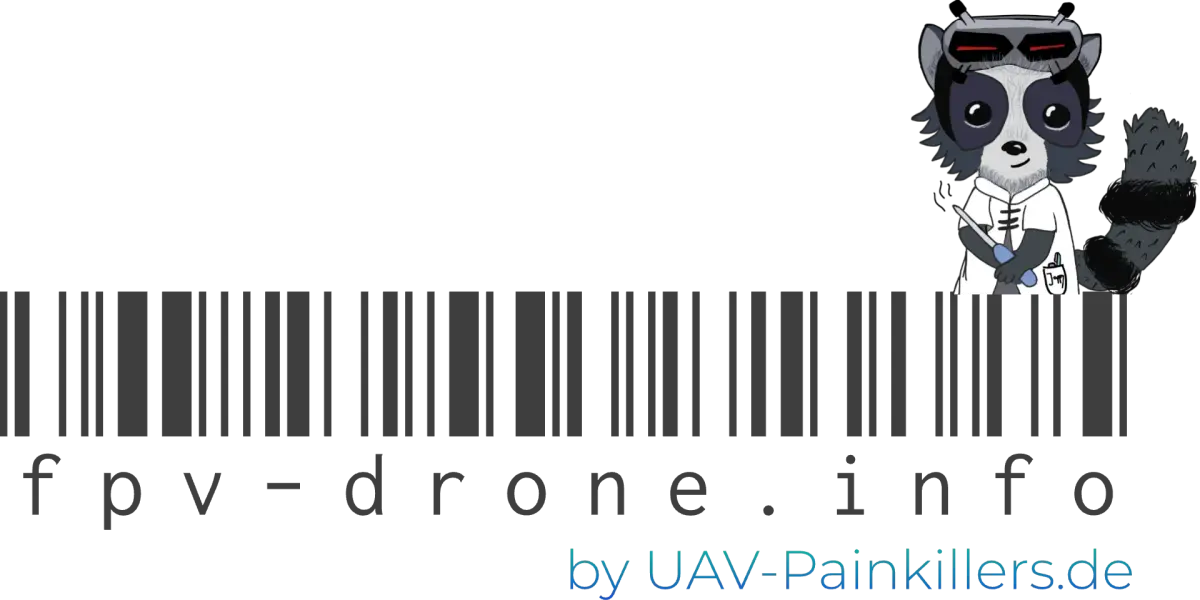
Click to enlargeFür den nächsten Schritt benötigen wir Zugriff auf die generierte Logdatei.
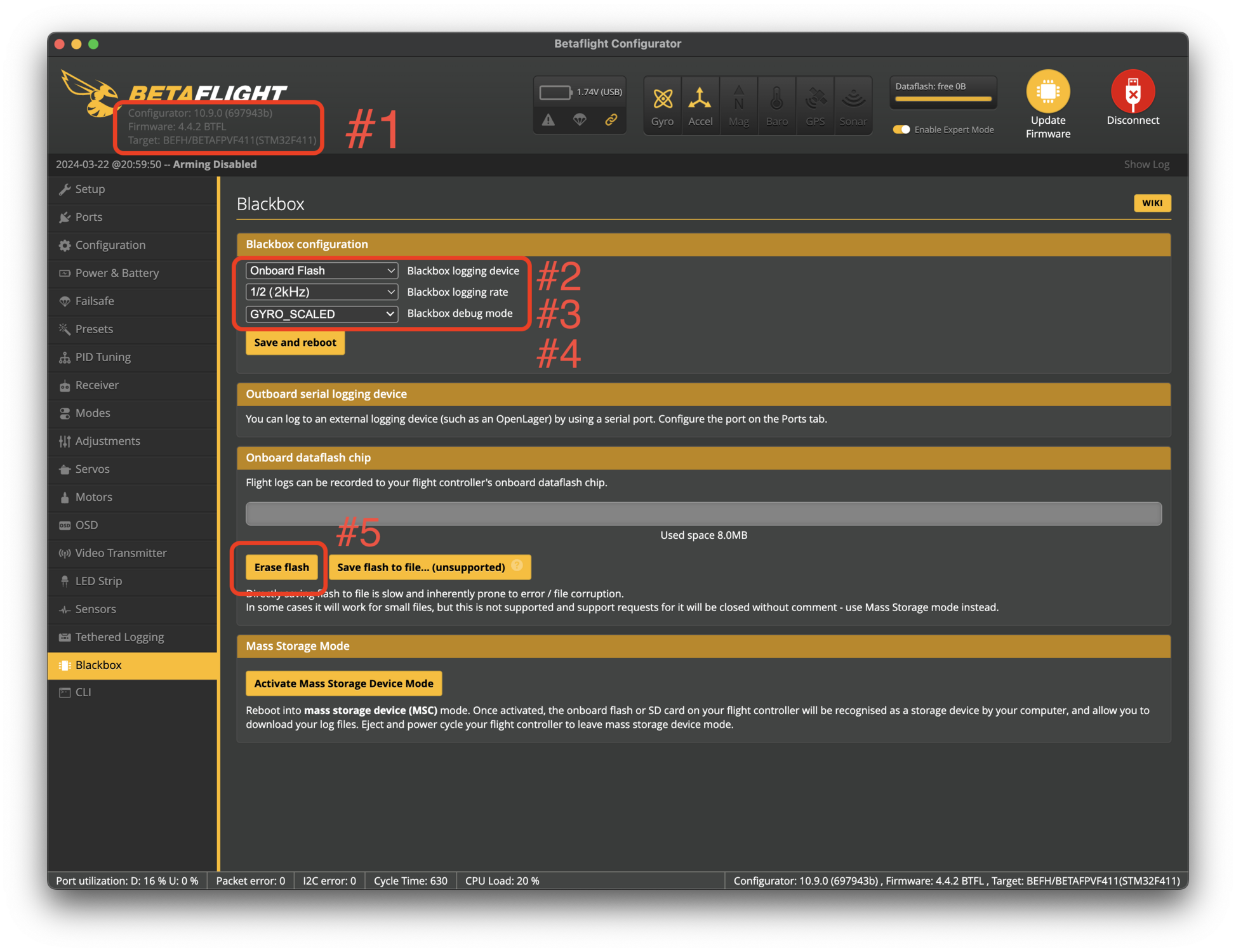
Verbinde deine Drohne mit dem betaflight-Konfigurator, öffne den Reiter „Flugschreiber“ und klicke auf „Massenspeichermodus aktivieren“.
Ein neues USB-Speichermedium wird auf deinem Computer erscheinen (wie ein USB-Stick)
Öffne dieses Gerät auf deinem Computer (wie einen USB-Stick) und suche eine Datei namens „btfl_all.bbl“.
Kopiere diese Datei auf deinen Computer.
Step 1.4
P & I Verstärkung - Analyse
 Click to enlarge
Click to enlargeWir wollen nun deine Flugprotokolle durch den Analysator laufen lassen und herausfinden, welche Schiebereglerwerte zu der besten Reaktion geführt haben.
Das Ziel ist es, die Flug-/Reaktionskurve zu finden, die sich am schnellsten und am nächsten an den Wert 1 annähert, ohne darüber hinauszuschießen und ohne zu sehr um den Wert 1 zu pendeln.
In der diesem Schritt beigefügten Beispielanimation findest du ein Analysebeispiel.
Wir wollen erreichen, dass unsere Drohne schnell (schnelle Bewegung vom Boden zur Mittellinie) und präzise (kein Überschwingen/Pendeln) reagiert, ohne dass sie sich anschließend korrigieren muss.
Lade deine „btfl_all.bbl“-Datei in den Analysator hoch (große Schaltfläche unten) und vergleiche die Flüge (du kannst die Sichtbarkeit jeder Fluglinie in der Darstellung umschalten, indem du auf ihre Bezeichnung in der Legende oben in der Darstellung klickst)
Suche den Flug, der dem gewünschten Zustand am nächsten ist.
Setze den Schieberegler für die P & I-Verstärkung auf den Wert, der bei diesem Flug verwendet wurde, und drücke auf „Speichern“ (den Wert findest du in der Legende/Beschriftung der Grafik).
Du hast deine P & I Verstärkung erfolgreich eingestellt.
Um den Tuning Tools Analyzer nutzen zu können, musst du das eigentliche Analyseprogramm herunterladen und zwischenspeichern. Die Dateien sind ca. 150 MB groß. Wenn du derzeit einen begrenzten Datentarif hast, solltest du das berücksichtigen.
Step 2.1
Clear Blackbox
Beginnen wir mit einer frischen Blackbox, damit wir sicher sein können, dass genügend Speicherplatz vorhanden ist und wir keine früheren Flüge aus der kommenden Analyse herausfiltern müssen.
Bitte lösche jetzt deinen Blackbox-Flash-Speicher.
Step 2.2
Hauptmultiplikator - Flüge
 Click to enlarge
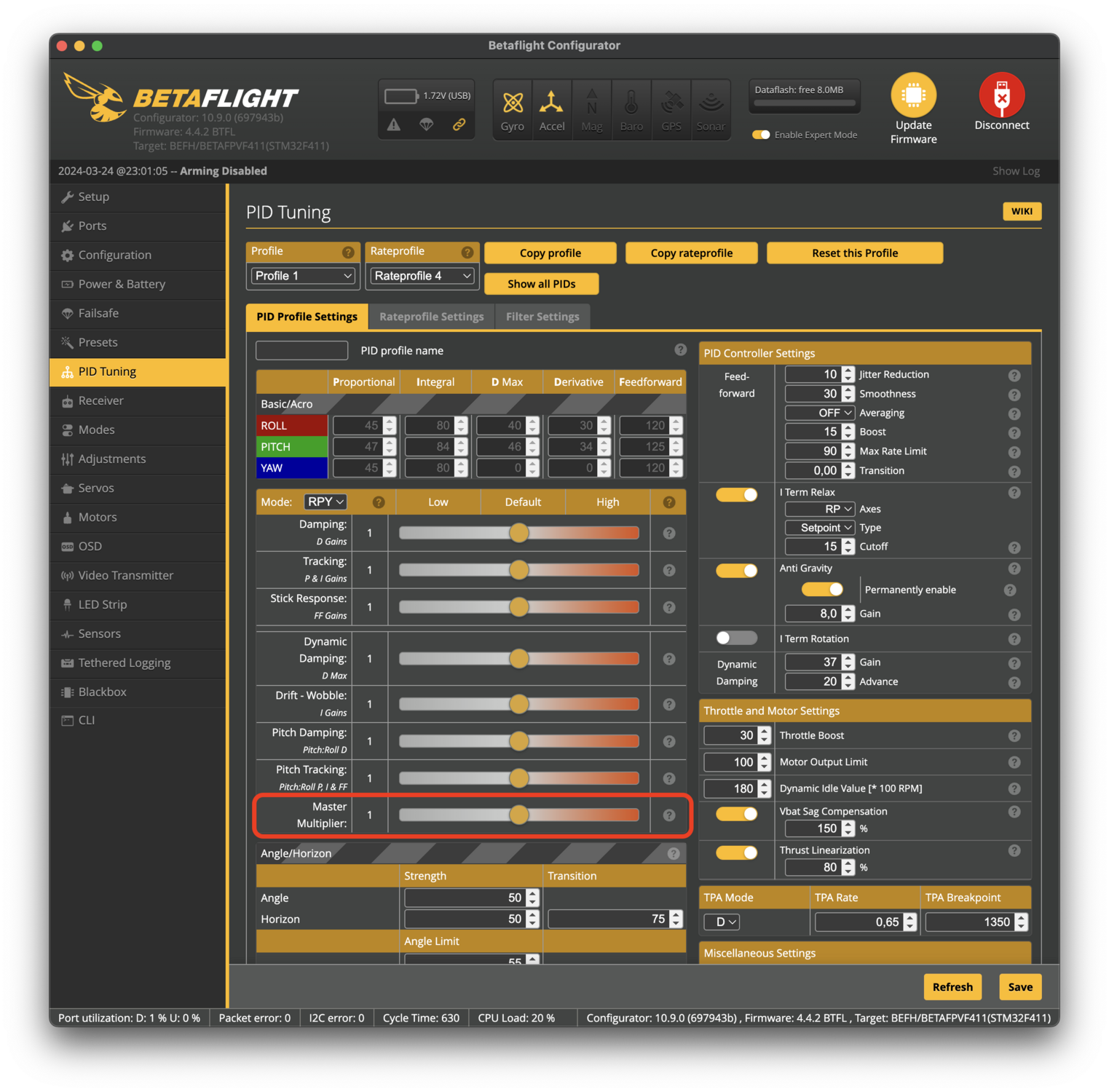
Click to enlargeJetzt ist es an der Zeit, einige Flüge zu machen.
Die Idee ist, einen Flug zu machen, dann den Hauptmultiplikator Slider eine Stufe weiter nach rechts zu schieben, und das zu wiederholen, bis du die maximale Sliderposition erreicht hast.
Wir empfehlen, ihn um 0,2 zu verschieben.
Fliege jedes Mal etwa 20 Sekunden lang.
Führe schnelle Roll- und Nickbewegungen aus (links, rechts, vorwärts, rückwärts).
Wenn du eine kleine Drohne tunest, kann es sein, dass du deinen Hauptmultiplikator auf den Maximalwert von 2,0 erhöhst, es aber immer noch Verbesserungspotential gibt (z.B. wenn deine Reaktionskurve noch nicht perfekt genug ist UND DEINE MOTOREN NICHT HEISSLAUFEN).
In diesem Fall kannst du deinen aktuellen „D Verstärkung (Dämpfung)“-Schiebereglerwert verdoppeln, ebenso wie deinen aktuellen „P & I Verstärkung (Nachverfolgung)“-Schiebereglerwert verdoppeln und dann deinen Hauptmultiplikator zurück auf 1,0 setzen.
Nun kannst du deinen Hauptmultiplikator weiter erhöhen.
Step 2.3
Logdatei extrahieren
Click to enlargeFür den nächsten Schritt benötigen wir Zugriff auf die generierte Logdatei.
Verbinde deine Drohne mit dem betaflight-Konfigurator, öffne den Reiter „Flugschreiber“ und klicke auf „Massenspeichermodus aktivieren“.
Ein neues USB-Speichermedium wird auf deinem Computer erscheinen (wie ein USB-Stick)
Öffne dieses Gerät auf deinem Computer (wie einen USB-Stick) und suche eine Datei namens „btfl_all.bbl“.
Kopiere diese Datei auf deinen Computer.
Step 2.4
Hauptmultiplikator - Analyse
 Click to enlarge
Click to enlargeFühre hier nun die selbe Analyse durch, wie bereits in Schritt 1.4 "P & I Verstärkung - Analyse", mit dem Unterschied, dass du am Ende den Hauptmultiplikator anpasst und nicht den "P & I Verstärkung" Slider.
Um den Tuning Tools Analyzer nutzen zu können, musst du das eigentliche Analyseprogramm herunterladen und zwischenspeichern. Die Dateien sind ca. 150 MB groß. Wenn du derzeit einen begrenzten Datentarif hast, solltest du das berücksichtigen.
Step 3.1
I Verstärkung - Betaflight Vorbereitung
 Click to enlarge
Click to enlargeWir müssen den I-Verstärkung Slider nicht wirklich abstimmen, sondern nur auf die Standardeinstellungen von Betaflight zurücksetzen.
Verbinde deine Drohne mit Betaflight und gehe auf die Registerkarte PID-Einstellung (#1).
Aktiviere den Expertenmodus oben rechts im Konfigurator (#2)
Verschiebe den Schieberegler „Drift - Wobble“ (I-Verstärkung) zurück auf 1,0 (#3)
Klicken Sie auf „Speichern“.
Step 3.2
Clear Blackbox
Beginnen wir mit einer frischen Blackbox, damit wir sicher sein können, dass genügend Speicherplatz vorhanden ist und wir keine früheren Flüge aus der kommenden Analyse herausfiltern müssen.
Bitte lösche jetzt deinen Blackbox-Flash-Speicher.
Step 3.3
Feedforward - Flüge
 Click to enlarge
Click to enlargeJetzt ist es an der Zeit, einige Flüge zu machen.
Schalte deine Drohne dieses Mal in den Acro-Modus. Das ist sehr wichtig!
Du kannst den Angle-Modus dafür nicht verwenden, da Feedforward im Angle-Modus deaktiviert ist.
Die Idee ist, einen Flug zu machen, dann den Feedforward-Schieberegler eine Stufe weiter nach rechts zu schieben, und das zu wiederholen, bis du die maximale Schiebereglerposition erreicht hast.
Wir empfehlen, ihn um 0,2 zu verschieben.
Fliege jedes Mal etwa 20 Sekunden lang.
Führe schnelle Roll- und Nickbewegungen aus (links, rechts, vorwärts, rückwärts).
Step 3.4
Feedforward - Analyse
Lass uns deine Flugprotokolle durch den Analysator jagen und herausfinden, welche Schiebereglerwerte zu den besten Reaktionen führten.
Dieses Mal müssen wir eine andere Art von Analyse durchführen.
Nun sehen wir pro Flug zwei Linien.
Die eine wird als Setpoint und die andere als Gyro bezeichnet.
Der Setpoint ist im Wesentlichen die Position, die die Drohne basierend auf deiner Knüppelposition haben sollte.
Und der Gyro ist die tatsächliche Position der Drohne, die mit dem Gyroskop gemessen wird.
Für die Abstimmung von Feedforward ist es wichtig, dass diese beiden Linien so identisch wie möglich sind. Wenn sie weiter auseinander liegen, bedeutet das, dass deine Drohne mehr Verzögerung hat und sich weniger präzise anfühlt.
Bitte beachte:
Das Diagramm enthält eine dritte Linie „feedforward“, die anzeigt, wie viel feedforward arbeitet, ignoriere sie einfach.
Lade deine „btfl_all.bbl“-Datei in den Analysator hoch (große Schaltfläche unten) und vergleiche die Flüge (du kannst die Sichtbarkeit jeder Fluglinie im Diagramm umschalten, indem du auf ihre Bezeichnung in der Legende oben im Diagramm klickst)
Suche den Flug, der dem gewünschten Zustand am nächsten ist.
Setze deinen Feedforward-Schieberegler auf den Wert, der während dieses Fluges verwendet wurde, und drücke auf Speichern (du findest den Wert in der Legende/Beschriftung des Diagramms)
Du hast dein Feedforward erfolgreich eingestellt.
Du kannst einfach in das Diagramm hineinzoomen, indem du auf das Symbol oben rechts klickst, das wie ein Quadrat mit einem Plus in der oberen linken Ecke aussieht, und dann einen Bereich von Interesse im Diagramm auswählst.
Um den Tuning Tools Analyzer nutzen zu können, musst du das eigentliche Analyseprogramm herunterladen und zwischenspeichern. Die Dateien sind ca. 150 MB groß. Wenn du derzeit einen begrenzten Datentarif hast, solltest du das berücksichtigen.
Step 4.1
Dynamischer Leerlaufwert
 Click to enlarge
Click to enlargeJetzt müssen wir den dynamischen Leerlauf setzen.
Dies ist wirklich einfach, gib einfach deine Propellergröße (in Zoll) in das entsprechende Feld ein und unser Rechner wird den benötigten Dynamischen Leerlaufwert berechnen, den du dann in das Feld Dynamischer Leerlauf in Betaflight abspeichern kannst (siehe das beigefügte Bild)