
Vorbereitung
 Click to enlarge
Click to enlargeStep 1
Gyro Filter
 Click to enlarge
Click to enlargeBeginnen wir mit der Konfiguration der Grundlagen.
Verbinde deine Drohne mit Betaflight und navigiere zur Registerkarte „PID Tuning“.
Auf der Registerkarte „PID-Einstellungen“ ( #1 ) siehst du eine Tab-Leiste mit drei Einträgen. Öffne den Tab „Filter Einstellungen“ ( #2 ).
Nun wende das Folgende an
Deaktiviere „Gyro Tiefpass 1“ (#3)
Wenn deine „Gyro Update Frequenz“ dieselbe ist wie deine "PID Loop Frequenz" (diese findest du im „Grundkonfiguration des Copters“ Tab), deaktiviere auch „Gyro Tiefpass 2“ (#4)
Wenn deine „Gyro Update Frequenz“ NICHT mit deiner „PID Loop Frequenz“ übereinstimmt, verschiebe den „Gyro Filter Multiplikator“ Regler (#5) auf das Maximum von 2.0
Wenn du dir nicht sicher bist, was du tun sollst, sieh dir das beigefügte Bild an, das zeigt, wo du alle Eingabefelder / Informationen finden kannst.
Step 2
Fliegen
Jetzt ist es an der Zeit, ein paar Flüge zu machen, um ein oder mehrere gute Blackbox-Logs für die kommenden Filtertunings zu bekommen.
Du musst nichts Verrücktes tun,
Fliege 20 Sekunden bis eine Minute lang, mache ein paar Rollen, Flips und Gasstöße.
Du solltest auf jeden Fall in allen verfügbaren Gasbereichen fliegen („Gasstöße“ bis zum Maximum oder einfach schnelles Vorwärtsfliegen mit steigendem Gas bis zum Maximum).
Du kannst gerne mehrere Flüge machen, so kannst du die Logs vergleichen, falls einer mehr oder weniger Noise enthält als der andere.
Step 3
Logdatei extrahieren
 Click to enlarge
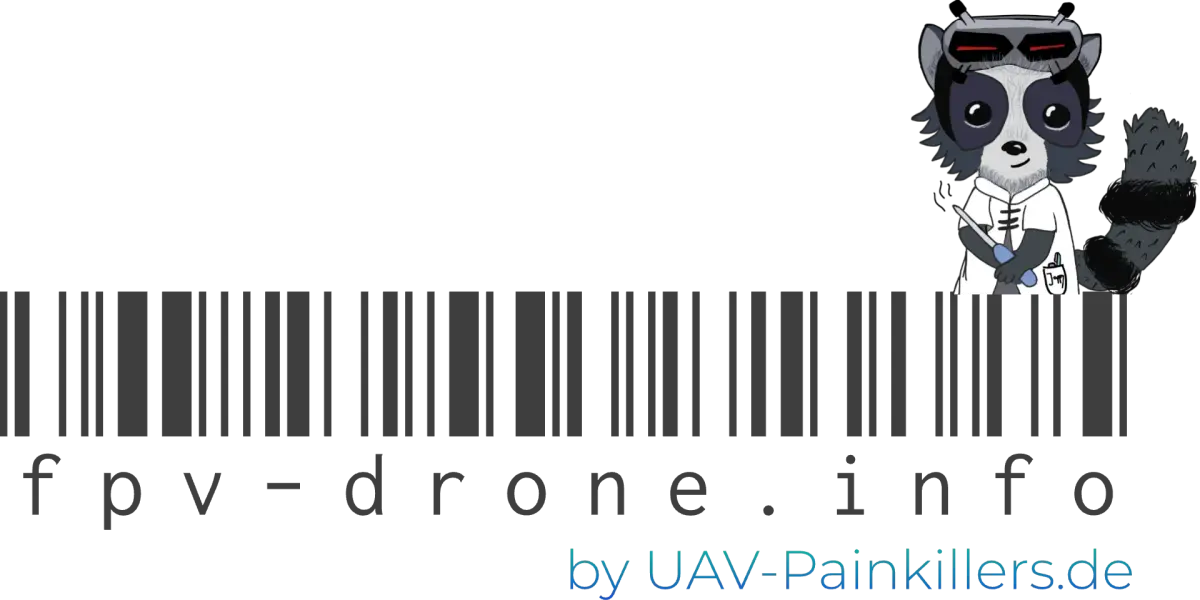
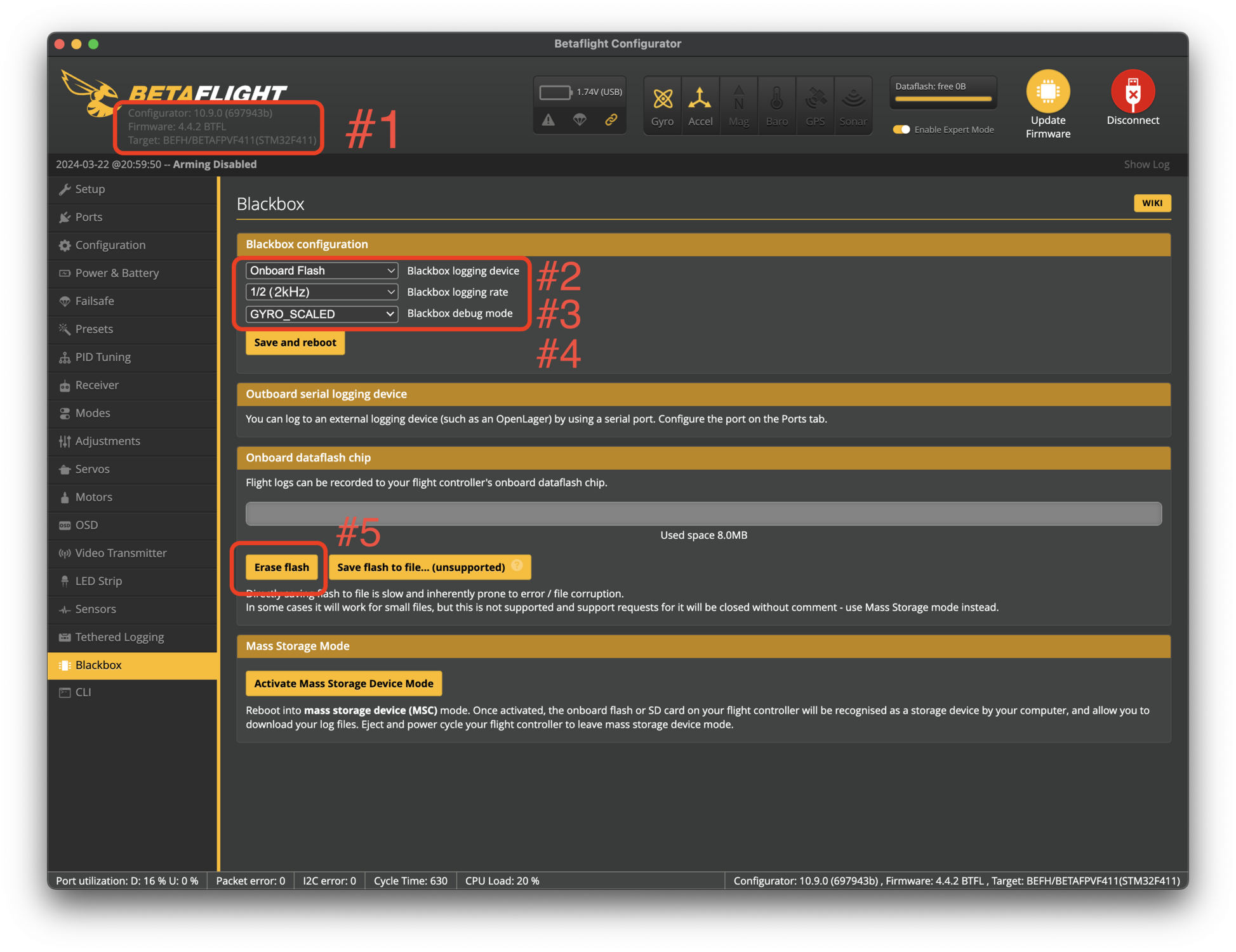
Click to enlargeFür den nächsten Schritt benötigen wir Zugriff auf die generierte Logdatei.
Verbinde deine Drohne mit dem betaflight-Konfigurator, öffne den Reiter „Flugschreiber“ und klicke auf „Massenspeichermodus aktivieren“.
Ein neues USB-Speichermedium wird auf deinem Computer erscheinen (wie ein USB-Stick)
Öffne dieses Gerät auf deinem Computer (wie einen USB-Stick) und suche eine Datei namens „btfl_all.bbl“.
Kopiere diese Datei auf deinen Computer.
Step 4.1
RPM Filter - Analyse
 Click to enlarge
Click to enlargeJetzt wird es interessant, lass uns unsere erste Analyse machen.
Deine Aufgabe ist ziemlich einfach:
Lade deine gespeicherte Logdatei (btfl_all.bbl) in den untenstehenden Analysator hoch.
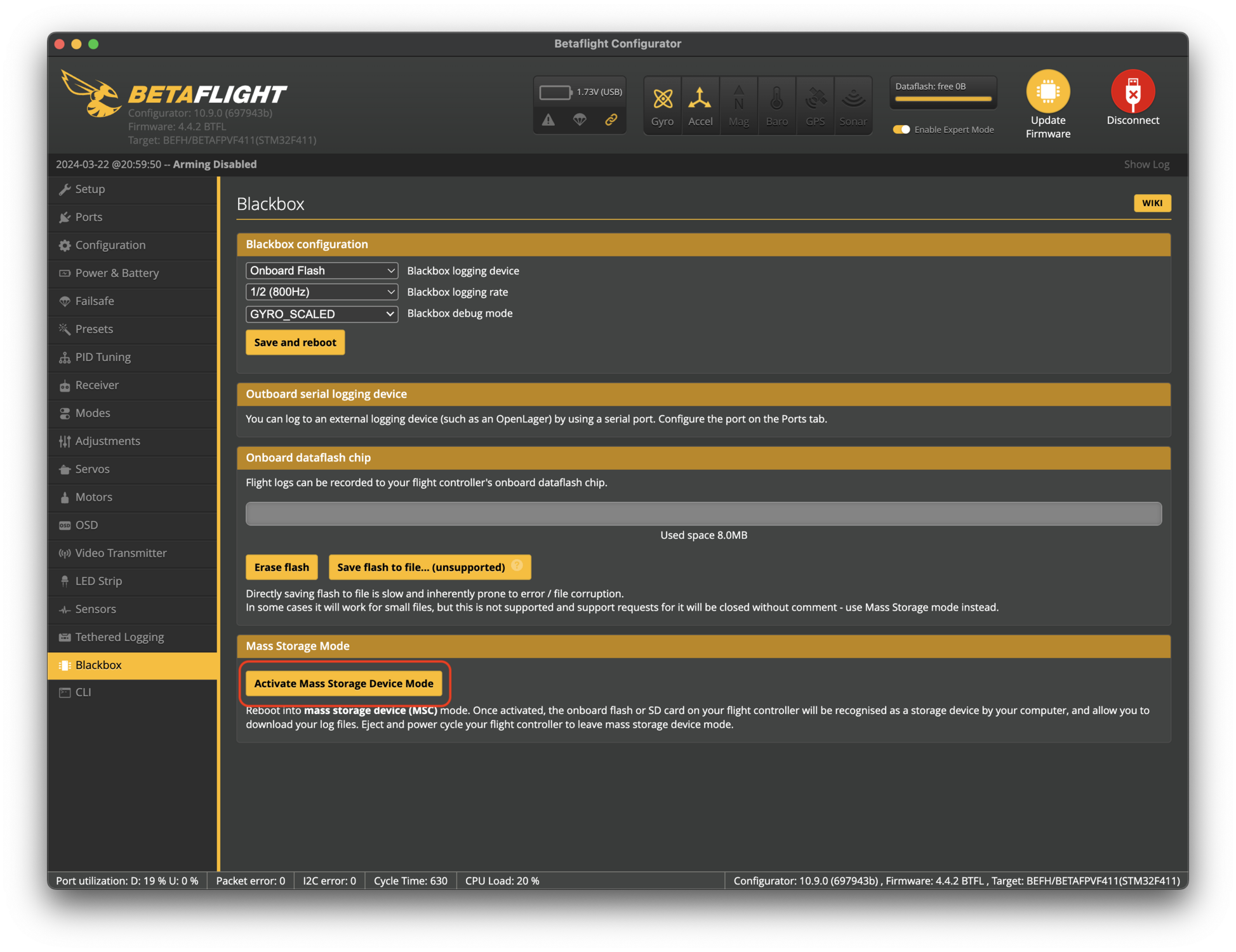
Zähle die diagonalen „Linien“ (Oberschwingungen) in deinem Diagramm (siehe beigefügtes Bild als Referenz) und merke dir diese Zahl (oder schreibe sie irgendwo auf).
Nun musst du die niedrigste Frequenz finden, bei der eine dieser Linien beginnt (der am weitesten links liegende Punkt einer dieser Linien) und dir auch diese Zahl merken bzw. aufschreiben.
Um den Tuning Tools Analyzer nutzen zu können, musst du das eigentliche Analyseprogramm herunterladen und zwischenspeichern. Die Dateien sind ca. 150 MB groß. Wenn du derzeit einen begrenzten Datentarif hast, solltest du das berücksichtigen.
Step 4.2
RPM Filter - Konfiguration
 Click to enlarge
Click to enlargeJetzt musst du diese Zahlen nur noch in die richtigen Felder in Betaflight eintragen.
Verbinde deine Drohne wieder mit Betaflight und navigiere zurück zum Abschnitt „PID Einstellungen“ und dort zum Reiter "Filtereinstellungen".
Setze die „Gyro RPM Filter Harmonie Anzahl" (#1) auf die Anzahl der Linien, die du gezählt hast.
Setz die „Gyro RPM Filter Minimale Frequenz (Hz)“ (#2) auf die niedrigste Frequenz, die du vorher aufgeschrieben hast.
Wenn du Probleme hast, diese Eingaben zu finden, sieh dir das beigefügte Bild an.
Step 5
Dynamischer Notch Filter
 Click to enlarge
Click to enlargeWerfen wir einen Blick auf den dynamischen Notch-Filter.
Hierfür können wir die vorherige Grafik/Analyse verwenden.
Bestimme die Anzahl der vertikalen "Balken" im Diagramm (siehe beigefügtes Bild, um zu sehen, was ich meine) und setze sie als „Anzahl Kerbfilter(Notches)“ (#1)
In einigen Fällen kann es sein, dass es überhaupt keine vertikalen Balken gibt, wenn dies bei deiner Drohne der Fall ist: Schalte einfach den dynamischen Notch-Filter aus.
Zusätzlich musst du den Anfang und das Ende des Notch-Filterbereichs festlegen.
Setze die „Min. Frequency [Hz]“ (#2) auf die Frequenz, bei der der erste Balken beginnt und ziehe ~25Hz ab.
Lass die „Max. Frequenz [Hz]“ auf dem Standardwert, das ist in Ordnung so wie es ist.
Step 6
D-Wert Filter
 Click to enlarge
Click to enlargeDiese Einstellung ist ziemlich einfach und erfordert keine Analyse von Diagrammen.
Alles, was du tun musst, ist, den Schieberegler „D-Wert Filter Multiplikator“ leicht zu erhöhen, bis deine Motoren während des Fluges heiß werden oder du Oszillationen (Schwingungen) hörst.
Wenn dies der Fall ist, drehe den Schieberegler wieder ein wenig zurück und du bist fertig.